Home » Projects » Maritime Robotics » HROV Ifremer : embedded software and UI
HROV Ifremer : embedded software and UI
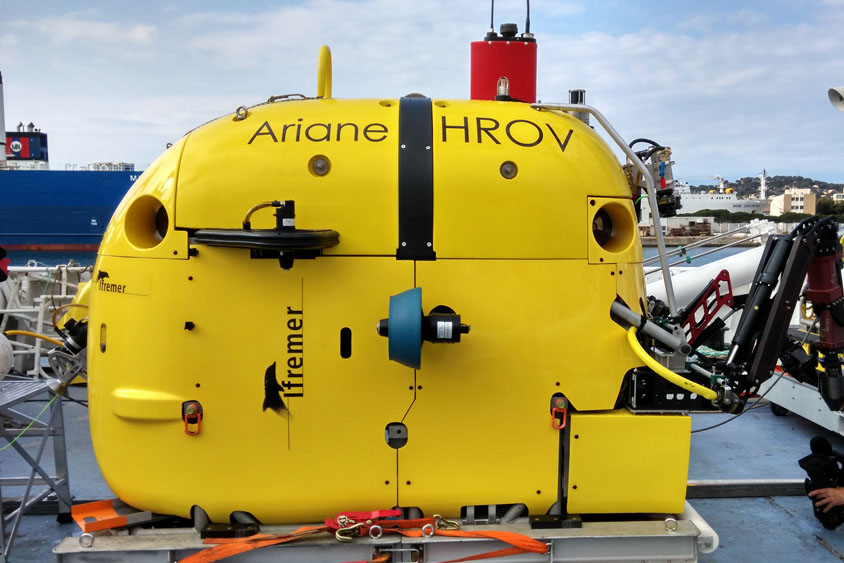
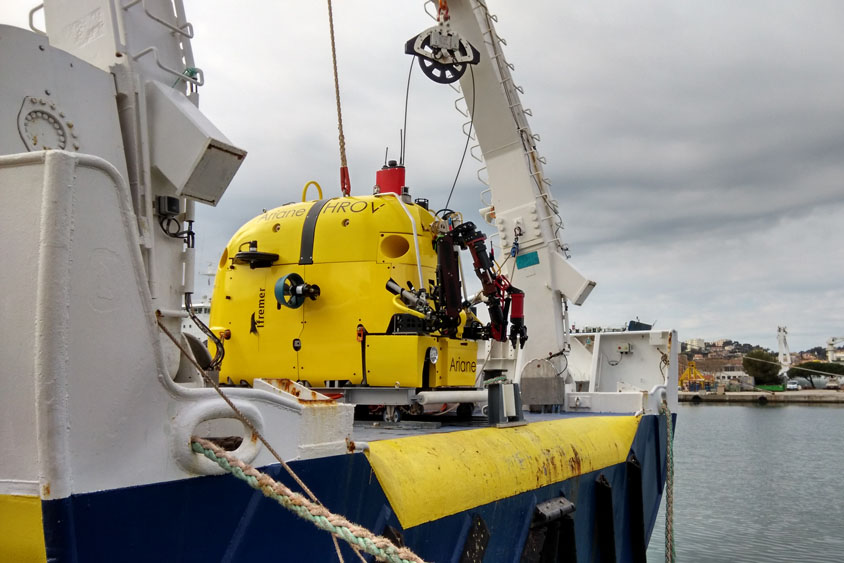
The Ifremer’s Arianne HROV is an intervention, inspection and hight resolution mapping mean, based on an hybrid underwater ROV (Remotely Operated Vehicle), allowing it to be deployed in a teleoperated (ROV) or autonomous (AUV) mode.
Robopec contributes to the embedded software and UI (User Interface) architecture and development based on the ROS middleware.
- ROS (Robotic Operating System) robotic framework trainings and expertise
- Breakdowns and faults management module
- Various drivers:
- Engine, Winch, Variators
- Pan & Tilt Turret
- Blueview Sonar
- Cameras
- Acoustic Modem
- Moog diagnostic card
- HROV Simulation in UWSIM (Under Water Simulator) a submarine environment simulator
- UI piloting migration to Qt-QML
- Performance optimization