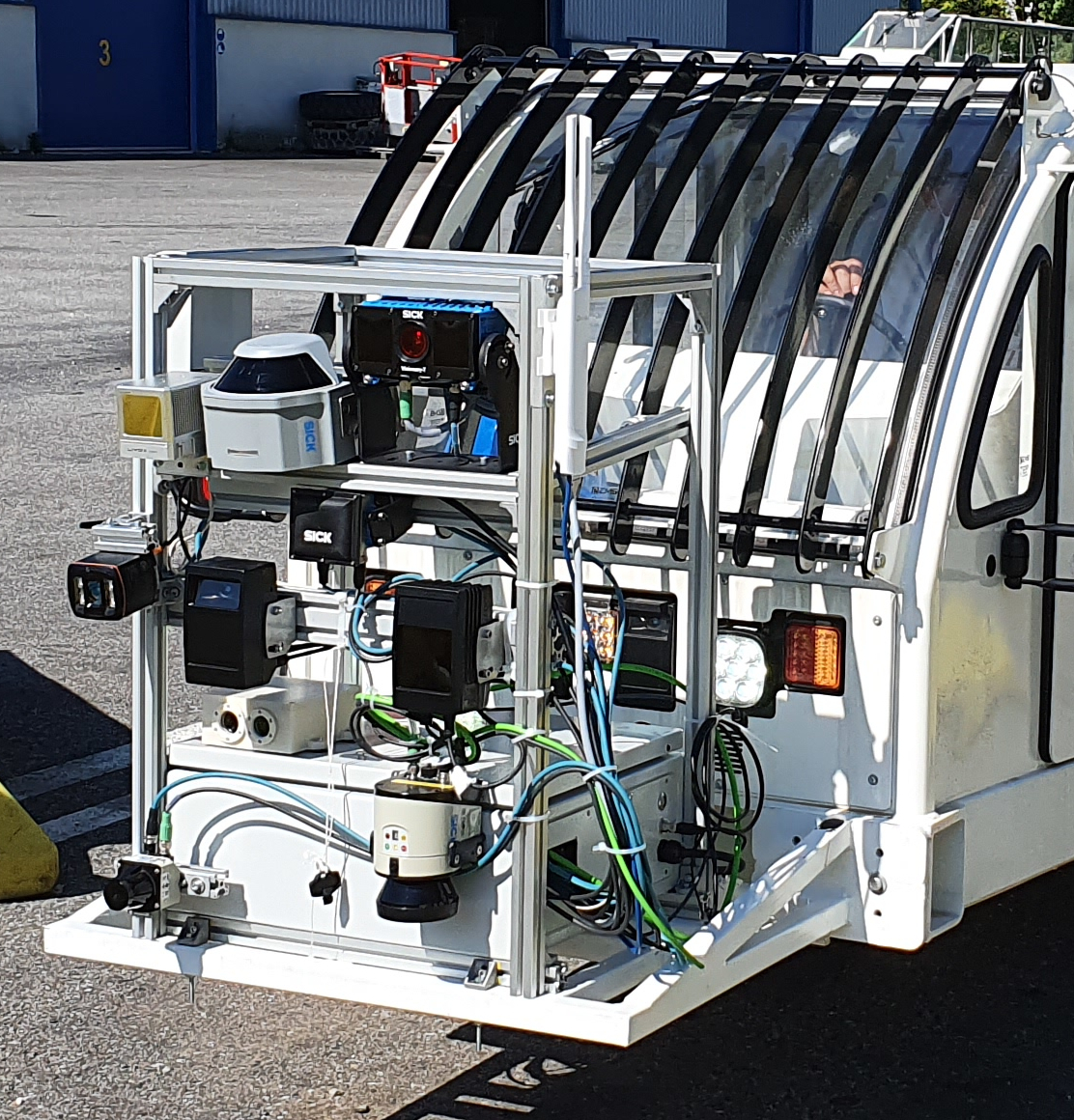
In order to feed its research and development in the field of ground autonomous navigation, the robotics and AI division of iXblue group, provide itself with an comprehensive perception system: a dozen sensors of different types, arranged on a transportable chassis. This system can be mobilized in record time for testing campaigns on industrial vehicles, such as trucks or tractors, or even on vehicles of opportunity.
The choice of sensors is the result of constant technology watch and privileged supplier relationships. 3D AND 3D LIDARS, 3D cameras, 2D cameras (infrared and visible spectra), radar and an Atlans-A3 inertial unit are connected to an industrial PC in charge of synchronized recording of all data. Thanks to ROS environment tools, this data is used in replay or simulation to evaluate and validate the performance of our autonomous navigation solutions (relative or absolute positioning, path finding, obstacle avoidance, automatic detection of landmarks, etc.). The implementation of these means allows, from first phases of a project, to characterize the specificities of the environment and confirm the choice of sensors. Some major technical risks are thus controlled very early.
This system adds a terrestrial segment to the range of testing methods of the Robotics and AI division already deployed on iXblue Sea Operations boats . A significant acceleration is expected on our way of the roadmaps in the field of autonomous land guidance, without giving up work on advanced perception (multi-sensor data fusion, detection and tracking at sea) and of naval and land autonomous navigation (SLAM, dynamic path planning, obstacle avoidance, COLREGs).