Maritime Autonomy
As a world-leading developer of industry-changing autonomous and uncrewed technologies, iXblue offers a complete ecosystem ensuring a smooth transition towards remotely supervised maritime operations. Through certified Uncrewed Surface vehicles, launch and recovery systems, towed vehicles, purpose-made payload gondola adaptations, inertial navigation, acoustic positioning systems, and Forward-Looking Sonars, we provide complete end to end system solutions and enable efficient deployments and successful missions to our clients. iXblue provides an open maritime autonomy ecosystem allowing clients to perform their own development.







Experienced Support Experts at Your Service
True specialists in autonomous platforms and remote operations, our teams of recognized support experts are there to help you deploy our technologies. Leveraging extensive experience in the Offshore and Geoscience industries, our global support teams will be able to bring their skills and expertise to your projects all around the word. Recognized for their readiness and proficiency, they will be at your side for every single phase of your projects, from mission planning and field mobilizations to operations and maintenance.


News & Customer Stories
-

- Maritime
Transitioning to remote hydrography: challenges & opportunities
With the advances taking place in newly developed autonomous platforms, hydrography is accelerating its revolution towards a 4.0 industry. The deployment of uncrewed surface vessels…Learn more -
- Maritime
Empowering autonomy at sea
As the maritime industry makes its transition towards more efficient and environmental-friendly autonomous operations, Exail, a world-leading developer of industry changing autonomous and uncrewed technologies,…Learn more -
- Maritime
Increasing the pace of ocean exploration through multi-vehicle collaboration
The OECI technology challenge set out to test collaborative capabilities of multiple uncrewed vessels for ocean exploration expeditions, with the aim of increasing the pace…Learn more -
 29 Nov 2022
29 Nov 2022- Maritime
DriX maritime surface drone receives Lloyd’s Register UMS certification
Lloyd’s Register, a leading marine classification society, has awarded its first certification for an Uncrewed Surface Vessel (USV) to the DriX maritime drone. Developed by…Learn more -
- Maritime
iXblue demonstrates collaborative Uncrewed surface & subsea vehicles capabilities to TotalEnergies
TotalEnergies has partnered with iXblue to demonstrate collaborative uncrewed capabilities for subsea inspection and asset survey operations.Learn more -
- Maritime
Enhancing hydrographic survey using Uncrewed Surface Vehicles
Hydrographic institutes have identified USVs as a leading-edge survey technology that force-multiplies data acquisition and that helps optimize survey productivity, efficiency and safety. This is…Learn more -
14 Apr 2022
- Maritime
NOAA’s Ocean Exploration Cooperative Institute takes delivery of DriX Uncrewed Surface Vehicle
UNH CCOM’s DriX and its novel Universal Deployment System complete successful sea acceptance trials and extensive personnel training.Learn more -
16 Mar 2022
- Defense
- Maritime
iXblue ramps up DriX USV production following strong commercial successes
As the maritime industry makes its transition towards more efficient and environmental-friendly autonomous operations, iXblue, a key player in maritime autonomy, has been ramping up…Learn more -
22 Nov 2021
- Maritime
British Antarctic Survey selects DriX USV to enhance its scientific capabilities
Deployed from polar research stations and from the British polar research ship RRS Sir David Attenborough, the DriX USV will help BAS conduct multi-disciplinary sciences…Learn more -
12 Oct 2021
- Maritime
iXblue launches new ROTV to enhance autonomous survey scope
Designed to be operated autonomously from iXblue DriX Uncrewed Surface Vehicle (USV) or from a light vessel, FlipiX enhances autonomous survey capabilities and allows to…Learn more -
29 Sep 2021
- Maritime
Bureau Veritas delivers Approval in Principle to DriX
Bureau Veritas delivers Approval in Principle (AiP) to iXblue for its DriX Uncrewed Surface Vessel.Learn more -
23 Jun 2021
- Maritime
iXblue demonstrates future hydrographic capabilities with DriX Unmanned Surface Vessel during IHO 100th anniversary
Identified by the IHO as a pioneer in the transition of the hydrographic industry towards more efficient and environmental-friendly unmanned maritime operations, iXblue presented the…Learn more -
1 Jun 2021
- Maritime
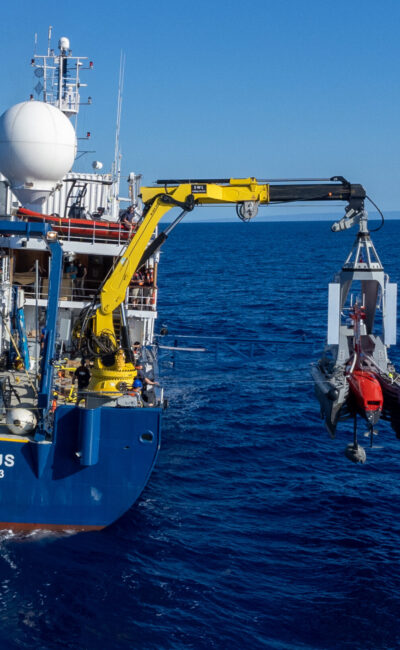
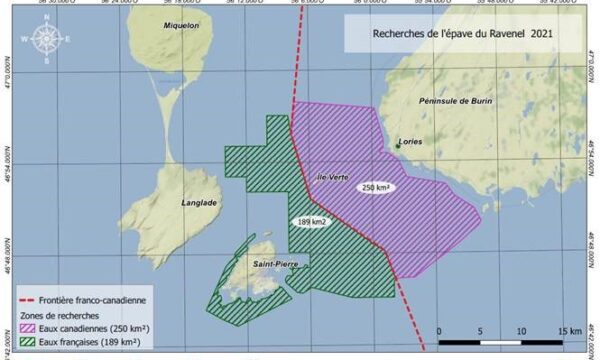
Operation Ravenel: The search for the wreck has begun in Saint-Pierre-et-Miquelon
Learn more -
25 May 2021
- Maritime
WAMS rental and services company invests in iXblue DriX USV to expand its operational capabilities
Available for WAMS customers in Brazil, the DriX USV will increase operational performance for shallow water hydrographic and geophysical surveys as well as LBL array…Learn more -
11 Feb 2021
- Maritime
Visite de la ministre de la Mer chez iXblue, pionnier de l’autonomie maritime
La ministre de la Mer, s’est rendue sur le chantier naval d’iXblue, spécialiste européen de la construction de navires et plateformes autonomes et pionnier de…Learn more -
5 Nov 2020
- Maritime
NOAA’ Ocean Exploration Cooperative Institute chooses DriX USV to help build the next generation ocean exploration system
Learn more -
- Maritime
NOAA tests DriX to demonstrate survey force-multiplier capability
NOAA tests the DriX USV to demonstrate hydrographic survey force-multiplier capability in offshore waters.Learn more -
- Maritime
Bringing operational efficiency to the Energy industry
Learn more -
9 Oct 2019
- Maritime
Unique Group signs agreement with iXblue to acquire five DriX units
With an aim to continually introduce latest cutting-edge technology for offshore survey operations, Unique Group’s new addition is designed for a wide range of tasks…Learn more -
7 Jan 2019
- Maritime
iXblue and Forssea partner to bring about more agile LBL deployment
iXblue and Forssea have joined forces to bring more agile and cost-effective subsea operations to companies operating on the challenging offshore market.Learn more -
12 Nov 2017
- Maritime
iXblue launches new USV
iXblue unveils its new multi-purpose USV: DriX. With proven offshore navigation capabilities and a top-speed unique in its category, DriX takes the USV role several…Learn more