Home » Projects » Maritime Robotics » USV ECA : embedded software and UI
USV ECA : embedded software and UI
As a recurring subcontractor of ECA Robotics, we regularly work on the development of software components related to the USV* (surface drone). We worked on the Inspector Mark II, the new USV proposed by ECA. We intervened as a software architect and developer on the following points.
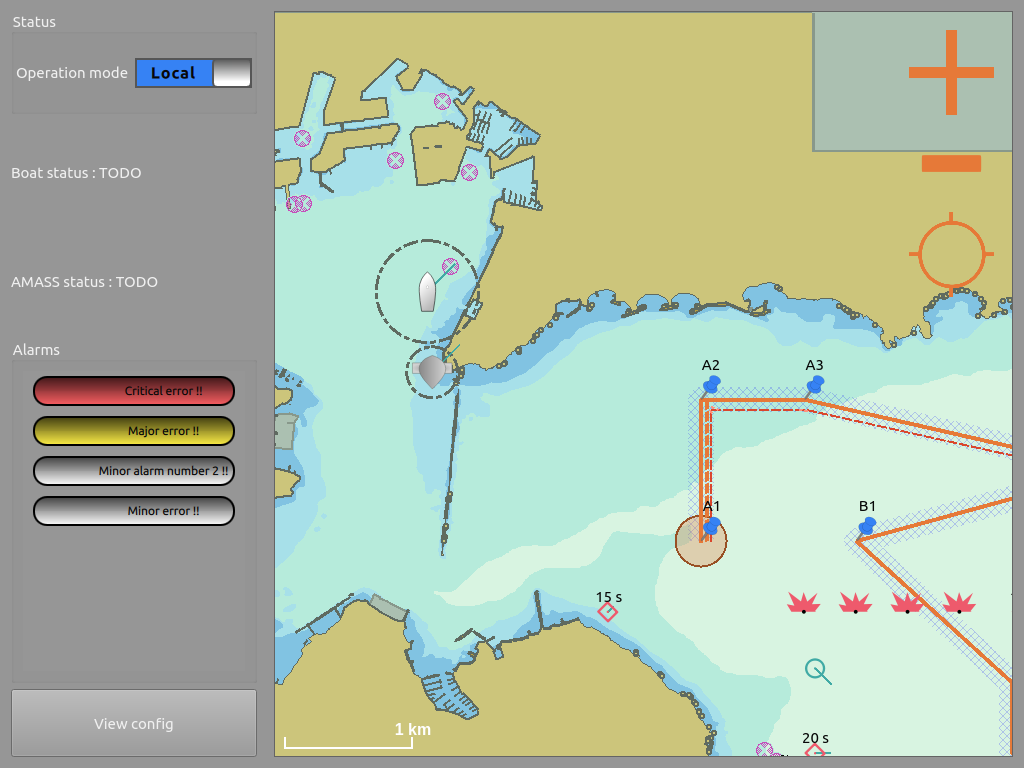
USV Remote control software
The ECA company has a control software for their AUV**. We modified the software to be compatible with the control of an USV, while maximizing reuse of existing code.
Controller and mission planner
We designed and developed software to perform tasks on the Inspector. The mission concept in this study is a dynamic state machine that allows the USV payload (multibeam sonar) and the boat to act automatically according to a mission planned in the control software.
Embedded software
We developed drivers to interface the equipment in the boat and make them compatible with ECA’s Middleware. The interfaced equipment are an Inertial Measurement Unit (IMU), automatons, CAN bus and other various devices necessary to automate the boat.
USV integration phase
Our intervention was not limited to the development of these applications. We also actively participated in the offshore testing of the USV software and algorithms.
*USV : Unmanned Surface Vehicle
**AUV : Autonomous Underwater Vehicles