Home » Projects » Maritime Robotics » Radar / S57 Map Merging
Radar / S57 Map Merging
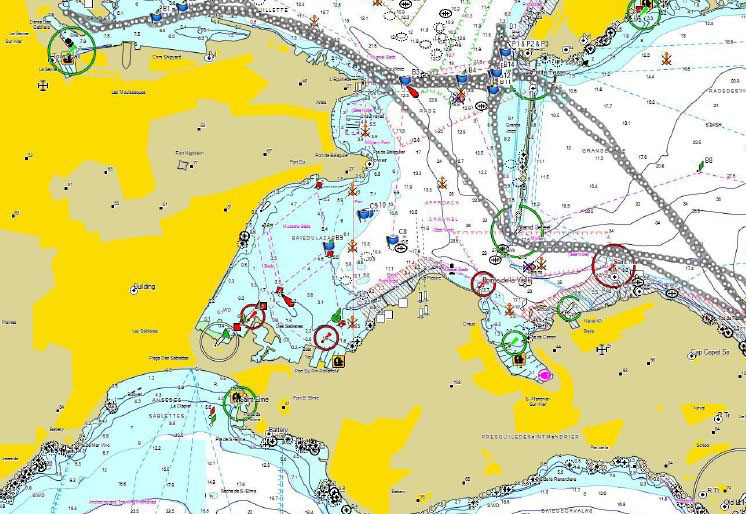
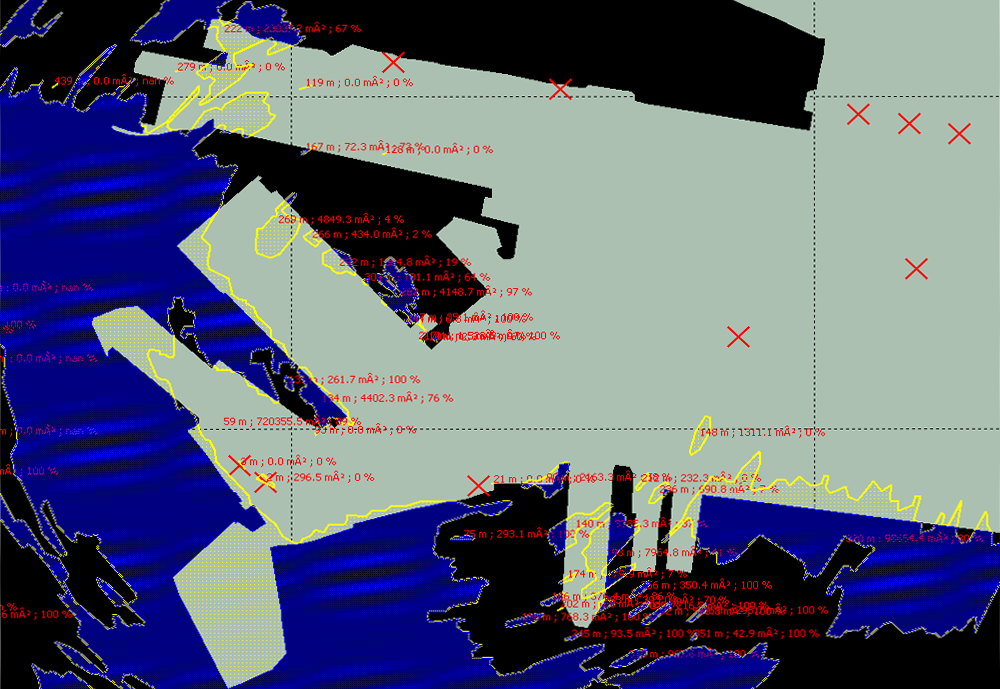
This Project for ECA is a radar tracks extractor merged with S57 format maps data. The extracted tracks are used by an operator and by the obstacle avoidance module of the USV (Unmanned Surface Vehicle). The merging with the S57 maps data enables to substantially decrease the wrong detection ratio.