Home » Projects » Ground Robotics » Outside Exploration Autonomous Robot
Outside Exploration Autonomous Robot
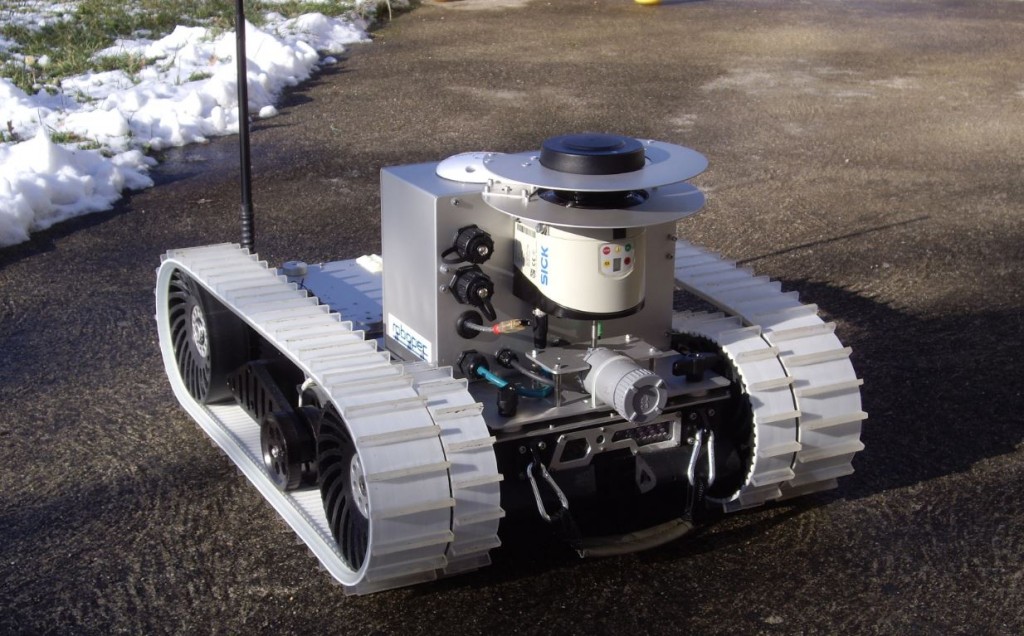
Thales Research and Technology (TRT) wanted to acquire a mobile robot equipped with sensors and algorithms allowing it to realise exploration missions totally autonomously. This platform had to be open for development so their research and development team could test its own algorithms.
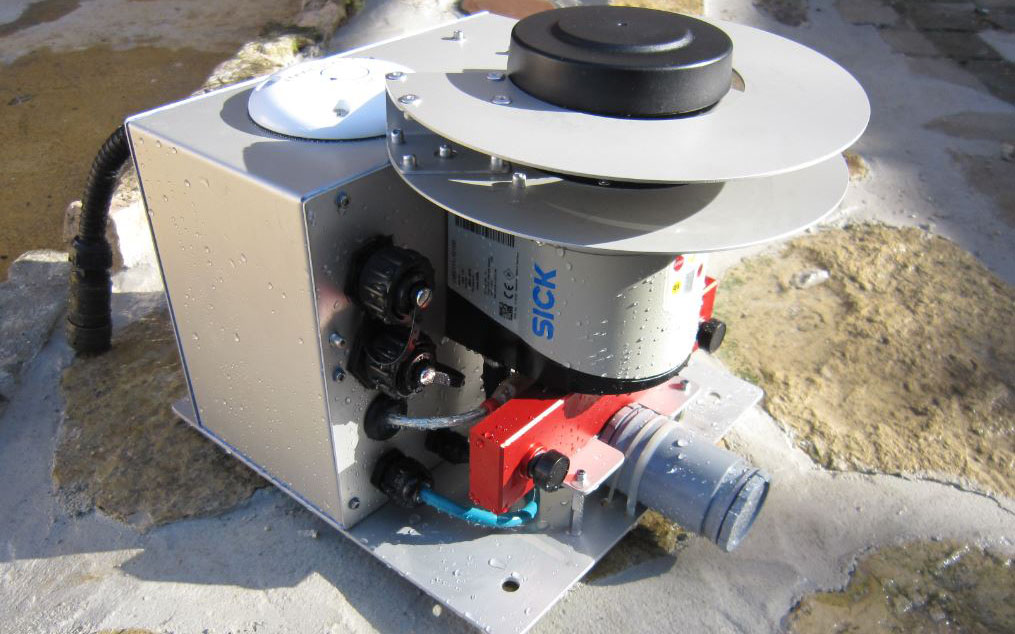
We integrated in the Cameleon robot from ECA a set of sensors. The module is IP65 and communicate with the robot through Ethernet. The module comes with a set of sensors:
- Sick LMS110 Lidar
- Septentrio GPS
- KVH Gyrocompass
- Videre Stereo Camera
- Ultrasounds

The autonomous module comes with many artificial intelligence and autonomy features:
- Outside localization through GPS, Odometry, and Inertial Measurement Unit data merging (Kalman filters).
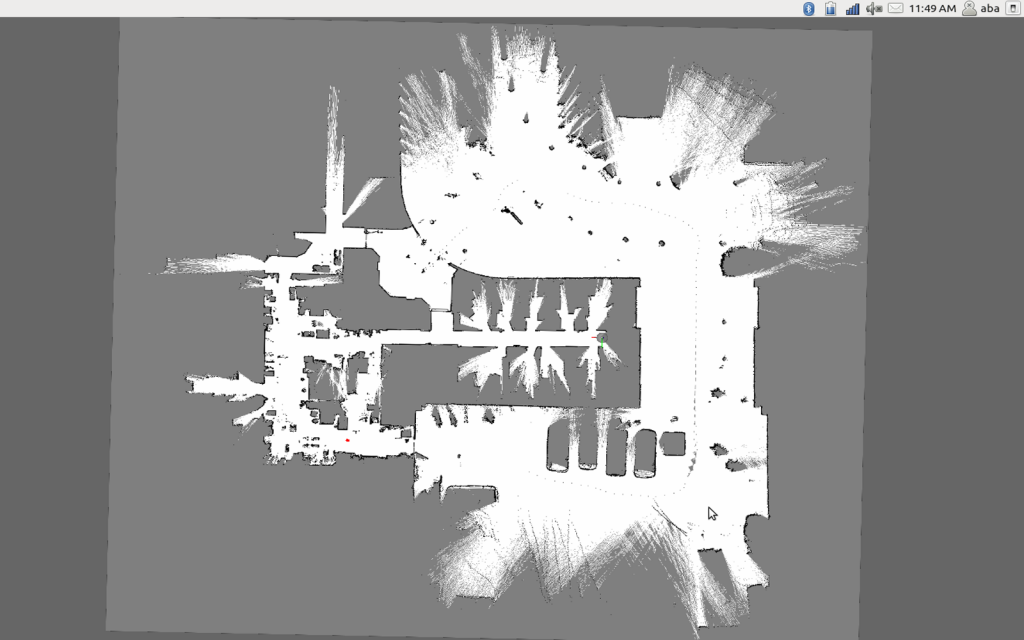
- Simultaneous Localization and Mapping (SLAM) with respect to the surroundings. With the lidar, the robot can recognize its nearby surroundings and use the sensors’ data to localize itself on a map that will be completed during the course of its movements.
- Automatic path following
- Obstacle detection and avoidance
- Real time path re-planning. If the obstacle avoidance lead to a significant gap with the initial planned path, this feature will look for a new path on the established map, allowing the robot to reach its final goal.
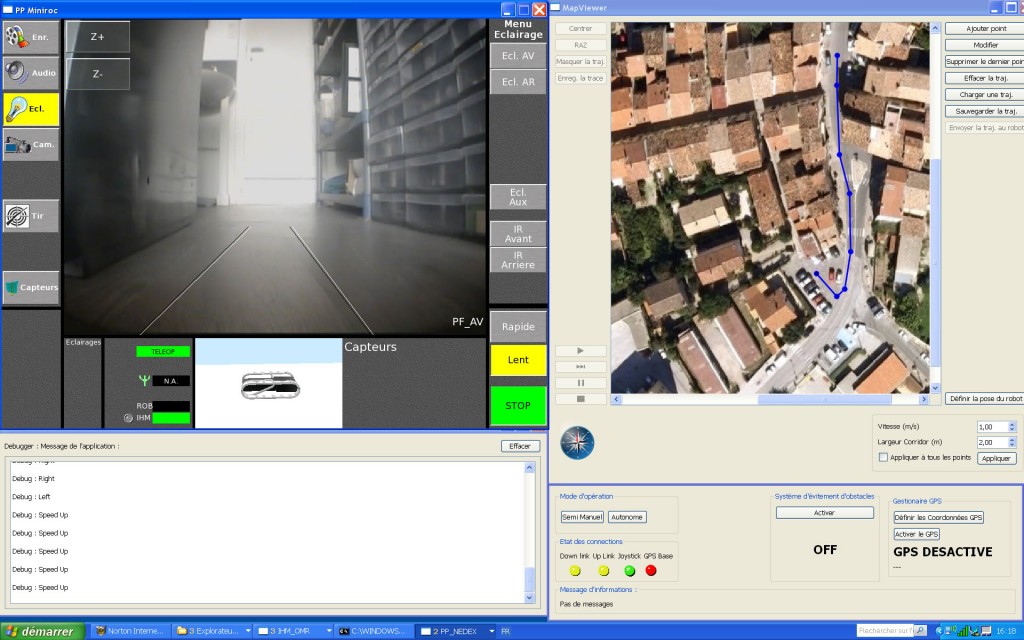
A UI (User Interface) installed on a remote computer communicates with the robot through Wi-Fi. It makes the robot set of features and its autonomous module available:
- Robot teleoperation with visual camera feedback
- Mission planning on a satellite image map (Google Maps or equivalent)
- Path finding in its surroundings: mission planning on a vectorial map created by the robot
- Real time mission follower
- Display of the robot state and alerts