Home » Projects » Ground Robotics » Indoor Inspection Autonomous Robot
Indoor Inspection Autonomous Robot
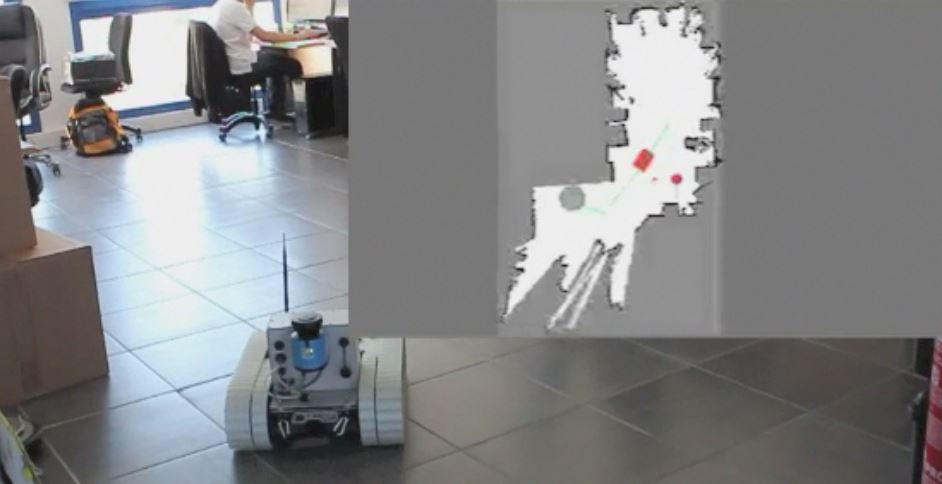
Within a DGA RAPID project and in partnership with ECA and INRIA Sophia, we developed an indoor inspection module allowing a small robot to inspect a building, create a map of it, locate in that map interesting spotted objects, in total autonomy.
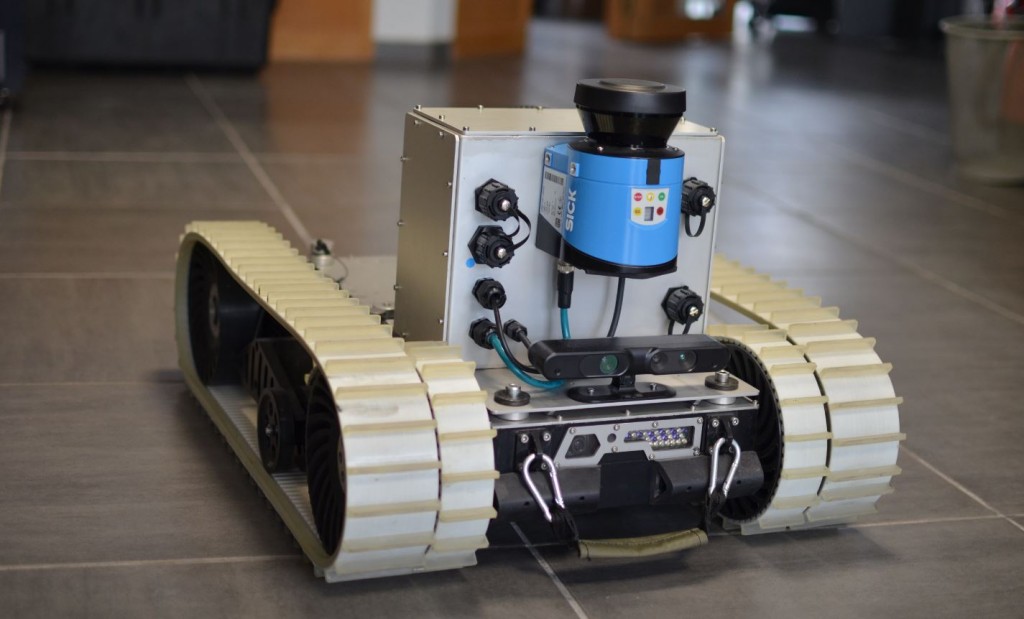
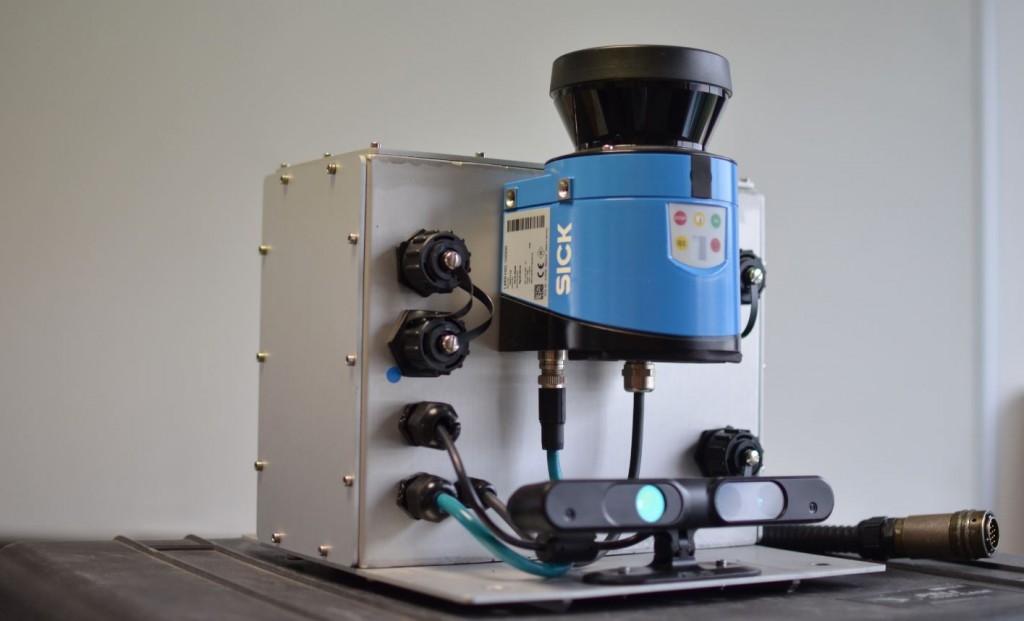
We integrated in the ECA robotics Cameleon robot a set of sensors :
- Sick LMS100 Lidar
- KHV Gyrocompass
- RGB-D Depth Camera (kinect-like)
The autonomous module comes with many artificial intelligence and autonomy features:
- Autonomous exploration. The algorithm identify the not yet explored area and defines an optimal exploration strategy.
- Path finding. The algorithm looks for the optimal path (Dijkstra).
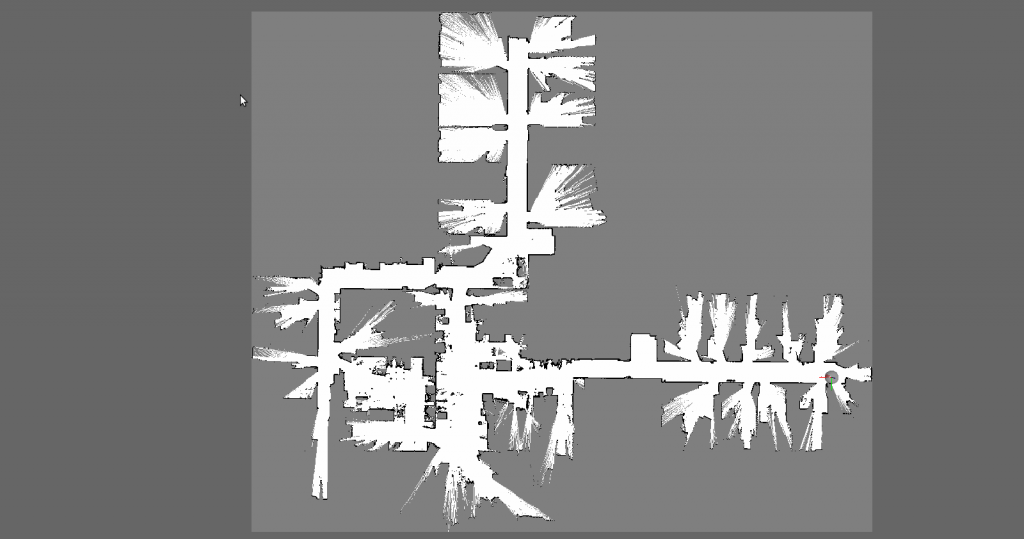
- Simultaneous Localization and Mapping (SLAM) with respect to its surroundings. With the lidar, the robot can recognize its nearby surroundings and use the sensors’ data to localize itself on a map that will be completed during the course of its movements.
- Automatic path following
- Obstacle detection and avoidance
- Real time path re-planning. If the obstacle avoidance lead to a significant gap with the initially planned path, this feature will look on the established map for a new path allowing the robot to reach its final goal.
-
Detection of areas of interest
- Object classification in categories through visual recognition ; Learning and Recognition Algorithm.

A UI (User Interface), installed on a distant computer, communicates with the robot through Wi-Fi. It makes the robot set of features and its autonomous module available:
- Robot Teleoperation with visual camera feedback
- Mission planning on a satellite image map (Google Maps or equivalent)
- Mission planning on a vectorial map created by the robot ; surmountable Path Finding in its surroundings.
- Real time Mission Follower
- Robot state and alerts display